Pneumatic muscle actuators (PMA) are soft, compliant, cheap and human-safe actuators that find numerous applications of soft robots ranging from manipulators to legged locomotion. However, the dynamic models of PMAs were complex and had no accurate hysteresis models. I proposed a new hysteresis model to enable direct pressure control of PMA.
Many continuum robots have been developed to imitate biological structures such as elephant trunks, squid arms, octopus arms, and lizard tongues. The designs and actuator configurations of these robots vary from: high degree of freedom (DOF) serial links to tendon based, and artificial muscle actuator based robots. Of these, the robots based on variable length pneumatic muscle actuators (PMA) exhibit strong potential for practical continuum robotic arms offering scalability, inherent compliance, smooth bending, and extensibility/contractility. With these characteristics, they outperform conventional rigid body robots in tasks such as human friendly interactions and whole arm grasping of objects of various shapes and sizes. In order to model PMA based continuum arms, a proper PMA model is required.
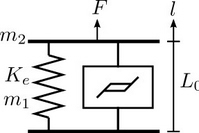
Developed in 1950s, PMAs have been subjected to extensive investigations resulting in different static and dynamic models varying of complexity. However, previous PMA models rely on many parameters that are difficult to quantify, subject to deviation in dynamic conditions, and pose control problems. In addition, many PMA models only considered the static hysteric behavior observed in PMA extension-contraction cycles. Further, all there models were intended for PMAs actuating in contraction mode. Thus, there is a need for a new PMA model that is simpler, accounts for dynamic hysteresis, models PMAs in both extending and contracting mode, and is suitable for dynamic modeling and control. Further, the existing planer or single section continuum arm models did not consider the PMA actuator dynamics in their models hence none were experimentally validated.