MR-guided robotic therapy is nowadays a growing technology to automatically plan, navigate, monitor and control the surgical devices to the target position inside the MRI room. In this project, we look into novel bi-directional and fast pneumatic motor design that can be integrated into MR conditional robots for tele-operable real-time surgical tools for neurosurgery.
The strong magnetic field of MRI scanner precludes the application of conventional electro-mechatronic motors that are made from ferromagnetic or para-magnetic materials. The introduction of direct current motors not only poses a dangerous risk to a patient by the strong magnetic force generated by the scanner but also adversely affects the image quality caused by the distorted static and gradient magnetic field.
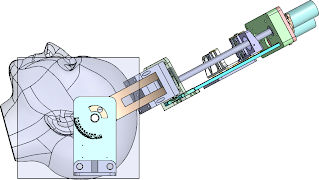
Pneumatic actuation is a promising alternative to provide MR-conditional actuation since its working principle is electromagnetically decoupled from MR scanner. Instead of driving by electricity, pneumatic actuator utilizes compressed air as the energy source, which is a standard configuration in the MR room. To date however, the pneumatic actuation in MR room was limited to stepper motors and piston type actuators. We propose a novel continuous bi-directional pneumatic motor with fiber optical encoders. Fig 1 shows the concept robot design of this ongoing research where the telerobot will then be mounted on the aiming frame to aim the needle size tools towards any desired location.