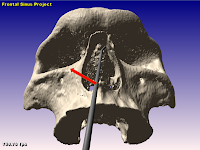
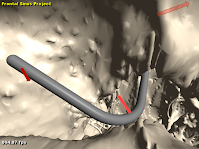
In this project, a minimally invasive, concentric tube based robotic tool is designed and evaluated for use in frontal sinus surgeries. The results showed that the proposed design has 62% better coverage of the frontal sinus space compared to the standard of care tools.
Research Members: Isuru Godage, Raul Wirz, Paul Russell, Madeleine Samuelson, and Robert J Webster.